| The essays, booklets, and books listed here are all online free, so that those who cannot afford them can still have access to them, and so that no one has to pay before they read something that might not be what they really are seeking. But if you read something here that you find meaningful and helpful and would like to contribute whatever easily affordable amount you feel it is worth, I will appreciate it. The button to the right will take you to PayPal where you can make any size donation you wish, using either your PayPal account or a credit card without a PayPal account. |
|
Left Turn Errors For Self-Driving Cars to Try To Avoid
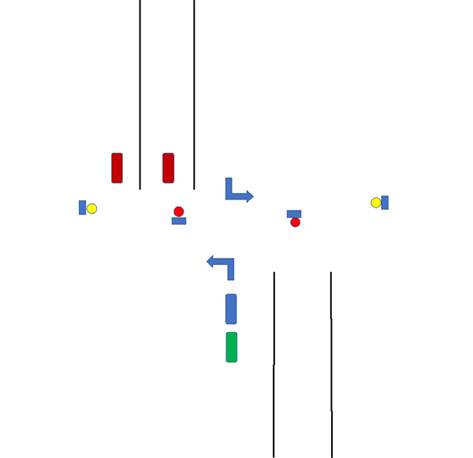
I made a driving error today (actually a stopped, waiting error) that I don’t think a self-driving car would likely have made, but it reminded me of two similar kinds of problems which humans and artificial intelligence would both find difficult. 1) The error I made occurred while I was stopped for a red light at an intersection waiting to turn into a shopping center. It was early Sunday morning and there was no other traffic, so just sitting there was frustrating, since I easily could have made the turn. The light was on a timer, not on a trip, since there were no cars there to have tripped it into turning red in the first place or kept it remaining red. I was the only car, and I was in the left turn only lane. I sat there silently lamenting the design or implementation of this traffic signal. There was another light a block ahead of me, and it turned green first, allowing two cars, side by side each other, to approach the light I was sitting at from the oncoming direction. I could see that the signal at my intersection was now turning yellow for the non-existent cross traffic, meaning that my light was about to turn green. I could see that was going to happen just as the oncoming vehicles were about to stop, meaning I would have to wait for them to accelerate and go through the light before me so I could then make my turn. The whole timing of the lights was just stupid for all of us, and I was mired in that thought as I had been since I had first stopped. My car is the one in blue in the following diagram showing the intersection, traffic lights and cars when the cross-traffic light turned yellow:
But I was not as annoyed as the driver who had just pulled up behind me who also wanted to turn into the parking lot, because he noticed what I had not -- that the oncoming cars were not moving because I not only had the green light, but also had a green turn arrow, meaning that they still had a red light from their direction. I was so focused on timing my turn after they passed by that I had only peripherally noticed my green light, and not looked directly at it to see there were two lights -- the normal round one, plus one with a left turn arrow. So he honked his horn, and my first thought was “I can’t go yet, you moron, because I have to wait for these two people to clear” but I double checked the light to see whether I was missing something, and I was. So I then made my turn. I don’t think a self-driving car
with limited
Artificial Intelligence would have made that error, although I do think
that a self-driving car with full Artificial Intelligence that lets it
think like a
human, might have -- for the same reasons I made it, because it would
have been
thinking about the wrong, though generally relevant, same information I
was
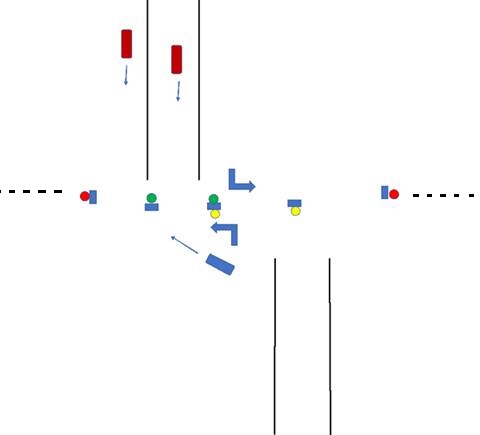
thinking about and focused on. 2) But I do think that a self-driving car would have had an accident of the sort I narrowly avoided one time in a somewhat similar situation but where the programming of the traffic signal had an unusual, and rarely occurring flaw in it. I was waiting to turn left in the turn lane at a green light where there were two lanes of fast moving oncoming traffic. I was into the intersection and waiting for the yellow light so I could complete my turn after the oncoming cars stopped for the red light. As the light turned yellow, the nearest oncoming cars were far enough away to easily start to slow down to stop for the ensuing red. Again, my car is the one in blue in the following diagram showing the intersection, traffic lights, and oncoming cars when the traffic light on my side turned yellow:
I proceeded to complete my turn across the two lanes of traffic, but the oncoming cars did not slow nor stop and honked their horns instead. I accelerated quickly to get out of their path, and they continued to honk as they drove passed me, indicating they clearly thought I had been in the wrong. I watched in the mirror behind me for the next cars to stop and to see the light now directly behind me be green (for what would have been the cross traffic to where I had been). It was still red, and none of the cars going through the intersection from what had been the direction of oncoming traffic had stopped. Only the cars going in my original direction had stopped. The light had turned red on the main road only on one side of the signal, not both sides. At first that made no sense to me, but then I decided that apparently I had not tripped the signal while waiting to turn left, but the cars from the oncoming direction waiting to turn left in front of the cars on my side of the highway had tripped the signal on their side to stop oncoming traffic from my direction and give them the green turn arrow. The reason it worked that way was that while this was normally an extremely busy intersection with traffic in all directions, I happened to be there when there was no cross traffic at the intersection and the traffic signal did not have to cycle through all its possibilities. It did not have to stop traffic on both sides of the main highway to allow cross traffic to take its turn. The signal did not ‘see’ me, but saw there were cars waiting to turn left from the other direction, so it turned amber and then red to stop the cars on my side of the road. Normally it would have been stopping cars on both sides of light, but it only stopped the ones on my side, and I had no way to see or reason to suspect oncoming traffic still had the green light. I called the city traffic engineer and explained what happened, but it took five minutes to get him to see the problem because he couldn’t fathom that the light had not completely cycled, since normally it always did -- because normally there was cross traffic. Normally the lights in all four directions cycle from fully green to yellow to red and then to green turn arrows and back to fully green again. I may or may not have finally got him to see that when there is no cross traffic and someone turning left from only one side, it might only turn red in one direction on that one side with no one approaching the intersection realizing that. I don’t see that a self-driving car would have
avoided the wreck, although the two oncoming cars, if self-driving, might have
braked to a stop when they saw me cutting in front of them despite their having
a green light (that I had good reason to believe was amber or red on their
side). 3) The third error does not require a traffic light’s being involved, but a traffic light magnifies the chance of making the error when, again, making a left turn, particularly on an amber light when one is in a hurry. And particularly at night, or in fog or heavy rain. The error is turning left in front of a median instead of after it. It occurs when the street coming in from the left looks like a two lane street, but what you are seeing is actually two lanes of a four lane street, and the two lanes you are seeing are on your side of a concrete median that appears to be a curb on the other side of the lanes. It would not likely happen if there were cars in that lane because you would see them; but it occurs when there are no cars in either lane or at least no car in the lane you are planning to turn into. It also would not likely occur if the median did not come so close to the intersection, blocking your view of the two far lanes on the other side of it, as you begin your turn. So you start to make the turn into what will be oncoming traffic after you have completed the turn. You are then hemmed in by the median on your right, and the road behind you that you just turned from, and possibly by oncoming cars in front of you in your lane. That is a messy situation requiring other drivers around you to be understanding and allow you somehow to extricate yourself. A self-driving car might know, from a complete internal or GPS map, that it is turning into a four lane road with a median even if it cannot see the other two lanes, and thus know to go beyond the median to make the turn, but if it doesn’t have such a map and goes by what it sees, I don’t think it will fare any better than a human at such an intersection. |